+7(812) 922-22-77


История роботов
 Философия автоматизации впервые была изложена древнегреческим мыслителем Аристотелем в IV веке до н.э. Но существуют данные, что автоматические машины создавались задолго до этого. Так, еще в 1300 году в Древнем Китае Yan Shi по прозвищу «ремесленник» создал механическую копию императора в натуральную величину, способную двигаться и издавать некоторые звуки. В ту же эпоху были созданы бамбуковая сорока и деревянная лошадь, также способные к движениям. В 322 году до н.э. древнегреческий изобретатель Архитос Тарентийский сотворил деревянного голубя, летающего при помощи струй пара. Большой вклад в развитие механики, гидравлики и пневматики внесли александрийские математики и философы Герон и Ктезибий, жившие в конце III века до н.э., многие их изобретения перевернули представления о возможностях человека.
Философия автоматизации впервые была изложена древнегреческим мыслителем Аристотелем в IV веке до н.э. Но существуют данные, что автоматические машины создавались задолго до этого. Так, еще в 1300 году в Древнем Китае Yan Shi по прозвищу «ремесленник» создал механическую копию императора в натуральную величину, способную двигаться и издавать некоторые звуки. В ту же эпоху были созданы бамбуковая сорока и деревянная лошадь, также способные к движениям. В 322 году до н.э. древнегреческий изобретатель Архитос Тарентийский сотворил деревянного голубя, летающего при помощи струй пара. Большой вклад в развитие механики, гидравлики и пневматики внесли александрийские математики и философы Герон и Ктезибий, жившие в конце III века до н.э., многие их изобретения перевернули представления о возможностях человека.
 В эпоху Средневековья значительная часть изобретений, трудов и чертежей древних изобретателей было уничтожено и утрачено, а развитие прогресса и, в том числе механики, приостановилось.
В эпоху Средневековья значительная часть изобретений, трудов и чертежей древних изобретателей было уничтожено и утрачено, а развитие прогресса и, в том числе механики, приостановилось.
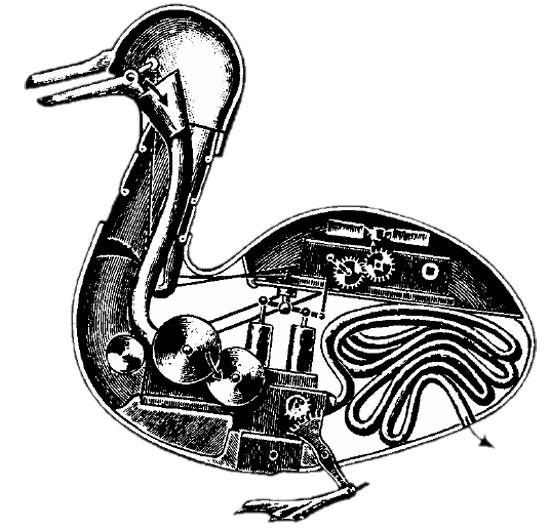
В конце XV века великий художник и изобретатель Леонардо да Винчи для развлечения королевской семьи спроектировал механического рыцаря, облачённого в броню, которого можно назвать первым антропоморфным роботом. Внутри доспехов находился механизм, приводящий в движение искусственного человека при помощи тросов и роликов, и позволявший ему имитировать человеческие движения. Подробные чертежи этого механизма были найдены в 1950-х годах, но не известно, был ли он собран. К другим замечательным изобретателям эпохи Возрождения относятся Торриано, сконструировавший в 1540 году женщину, играющую на мандолине, Жака де Вокансона, создателя механической утки, способной двигаться, пить и есть, Пьера Жаке Дроза – часовщика, создавшего сохранившихся по сей день «автоматонов» (антропоморфные роботы — художник, музыкант, каллиграф), Жозефа Мари Жаккара, Вольфганга фон Кемпелена и др.
Сам термин «робот» появился лишь в 1920 году, благодаря чешскому писателю-фантасту Карелу Чапеку и его брату и соавтору Йозефу. В действие одной из своих пьес «R.U.R» автор ввел человекоподобные механизмы, и назвал их «роботами» (от чешского robota – каторга, тяжелая работа, рабский труд). В литературе тему роботов развил писатель Айзек Азимов, а сборник рассказов «Я, робот» принес ему всемирную известность.
В 1951 году Рэймонд Гоерц, работающий в комиссии по атомной энергетике в США, спроектировал механический телеуправляемый манипулятор для работы с радиоактивными веществами, исключающий непосредственный контакт с ними человека. Несколько лет спустя был создан первый промышленный робот «Unimate». Использовавшийся для сварки и литья на заводах компании General Motors.
 История развития хирургических роботических систем начинается в 80-х годах ХХ века. Когда Соединенные Штаты Америки начали разработку своих амбициозных космических программ, руководители программы спросили себя, что случилось бы, если астронавтам потребуется неотложная хирургическая помощь во время пребывания их на орбите. Конечно, для этого было нецелесообразно создавать отдельную космическую станцию или модуль, в котором был бы размещен традиционный операционный зал и постоянно находилась бригада хирургов. Специалисты Американского космического агентства (NASA) занялись решением этой проблемы. Наработанные ранее в военной сфере технологии привели к появлению медицинских роботов-ассистентов, которые позволяют максимально аккуратно совершать большое количество специфических хирургических манипуляций. Это дало возможность сократить вероятность появления осложнений, уменьшить операционную травму, снизить сроки госпитализации и реабилитации больных.
История развития хирургических роботических систем начинается в 80-х годах ХХ века. Когда Соединенные Штаты Америки начали разработку своих амбициозных космических программ, руководители программы спросили себя, что случилось бы, если астронавтам потребуется неотложная хирургическая помощь во время пребывания их на орбите. Конечно, для этого было нецелесообразно создавать отдельную космическую станцию или модуль, в котором был бы размещен традиционный операционный зал и постоянно находилась бригада хирургов. Специалисты Американского космического агентства (NASA) занялись решением этой проблемы. Наработанные ранее в военной сфере технологии привели к появлению медицинских роботов-ассистентов, которые позволяют максимально аккуратно совершать большое количество специфических хирургических манипуляций. Это дало возможность сократить вероятность появления осложнений, уменьшить операционную травму, снизить сроки госпитализации и реабилитации больных.
В 1985 году в мире впервые была представлена первая роботизированная хирургическая система «Puma 560», которая нашла свое применение в нейрохирургии.
Позднее появился манипулятор «PROBOT» для хирургического лечения трансуретральной резекции простаты.
В 1992 году для оказания хирургического лечения в области ортопедии при осуществлении протезирования суставов была разработана система «RoboDoc».
В 1993 году фирмой «Computer Motion Inc.» была разработана роботизированная система «Aesop» («Эзоп»). Она представляла собой «автоматическую руку» для фиксации и изменения положения видеокамеры при проведении лапароскопических операциях. Такая установка применяется в некоторых клиниках до сих пор.
Данные системы имели узкоспециализированное направление и лишь помогали в осуществлении определенных этапов в хирургических операциях. Они не являлись в полном смысле роботизированными системами.
В 1998 году мировой медицине была представлена первая универсальная роботизированная система «ZEUS» («Зевс»).
В конце 90-х годов компанией Intuitive SurgicalInc был разработан универсальный робот-хирург, способный проводить операции по различных нозологиям. Этот робот был назван «Da Vinci» («Да Винчи») в честь великого изобретателя Леонардо да Винчи, который в свое время сконструировал первого антропоморфного робота, способного двигать ногами и руками, осуществлять иные действия.
 В 2000 году Управление по контролю за продуктами питания и лекарственными средствами США (FDA) дало разрешение на проведение с помощью хирургического робота Да Винчи медицинских операций. В марте 2001 года Министерство здравоохранения Канады одобрило использование хирургического робота Да Винчи для операций брюшной полости и грудной клетки.
В 2000 году Управление по контролю за продуктами питания и лекарственными средствами США (FDA) дало разрешение на проведение с помощью хирургического робота Да Винчи медицинских операций. В марте 2001 года Министерство здравоохранения Канады одобрило использование хирургического робота Да Винчи для операций брюшной полости и грудной клетки.
Роботизированная система Да Винчи позволила хирургам производить операции пациентам, даже не касаясь их. Находясь в пару метрах от больного, врач получает подробное представление о том, что происходит на операционном столе. В настоящее время единственной в мире универсальной роботизированной системой с дистанционным управлением считается система Да Винчи компании «Intuitive SurgicalInc». Многие специалисты в развитых странах мира сегодня оперируют с использованием этой технологии.